Keychain / fully working compliant Robot Gripper










Print Profile(0)
Description
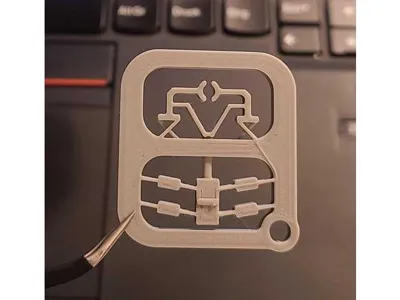
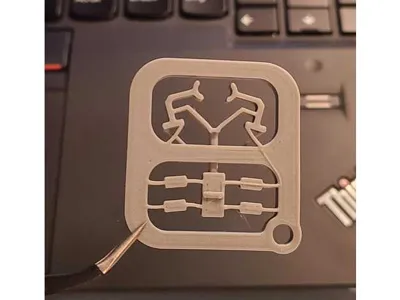
This is a fully functional bistable compliant robot gripper for your keychain.
In its initial position the gripper is closed, when you push the switch in the middle upwards it snaps into its new position. This opens the gripper. The gripper remains open until you push the switch back into its original position.
When the gripper is closed, it should be possible to grip a round object with a diameter of 2 mm.
Its dimensions are approx.:
32 x 35 x 3 mm
So far, I haven't needed a robot gripper the size for a keychain on the road, but you never know! :-)
I hope you have as much fun with it as I did designing it.
If you have any ideas or suggestions for improvement, feel free to leave a comment.
How do you print it?
It consists of only one part and can easily be printed in around 30 minutes with no supports. I recommend a 0.12 mm layer height, a 20% gyroid infill and PLA. It is designed for PLA. It might work with other materials though.
I hope you like it. If it does not work for you please leave a comment or shoot me a message instead of just posting a 1 star review, I'm sure there is no problem that can't be solved.
License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (1)