Theo Jansen Mechanism - Educational model



Print Profile(2)


Description
My Educational Mechanical Examples Series
This model is one of my educational mechanical mechanism examples on 80mm x 80mm base plates.
You can find all models of the series in this collection => [Mechanical Mechanism Examples]

The present model
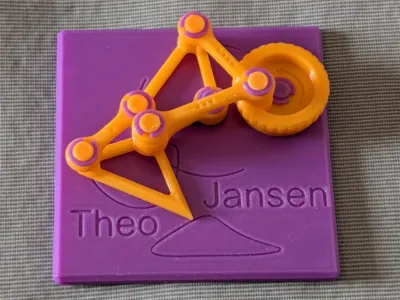
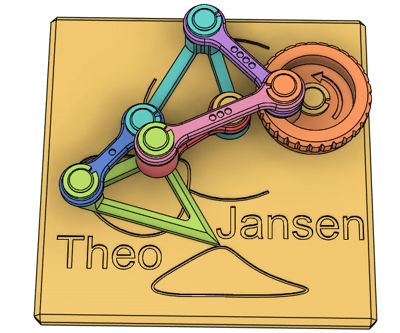
This is an educational model of Theo Jansen mechanism, which generates a walking motion for kinetic sculptures from a single rotational input.


Brief Description
Theo Jansen invented this mechanism to generate a walking motion for his kinetic sculptures, known as Strandbeesten, by deriving complex leg trajectories from a single rotational input.
The mechanism theoretically consists of eleven rods whose ends are connected by pivot joints.
In this model, the shortest input crank is replaced by a rotating disk.

Of the remaining ten rods, six form two triangles, each of which has a fixed shape.

With the exception of the disk’s center, only one point is fixed to the base plate; all other joints are free to move. Between the two fixed points, two four-bar linkage mechanisms are driven by the input crank. Each of these four-bar linkages drives one vertex of the two triangles, respectively.

A third four-bar linkage has only one fixed pivot. It receives motion by the two of its links, producing a complex trajectory at its remaining free point. This motion is transmitted to the lower triangle, causing the foot to trace a path suitable for walking.

The walking motion strongly depends on the carefully chosen lengths of each rod, so it is essential to assemble every rod in the correct position.
Case
This model is compatible with the case included in my first set.

Printing
- Use the models named ???-printable.stl for printing.
The models named ???-assembled.stl are provided just to show how they should be assembled.
- Use well-dried PETG to have better dimensional accuracy.
- Use 0.1 mm or 0.08 mm layer height to have smoother surfaces.
- Use slow printing speed for overhangs.
- Select “Random” seam position to have smoother rotation.
Randomly distributed seam should be easily worn out after some wearing.Printing
Sanding and Filing
Note that, in this model, the rotation of the bases for bearings is intentionally made not too smooth.
Sometimes, the gears suffer from the stringing effect and/or elephant foot effect, resulting in a too tight fit to the shafts (they are designed with a 0.15 mm radial clearance).
If you see rough surface on the shafts due to stringing, sand off the roughness with a small piece of sand paper.

If you feel the gears do not rotate smoothly due to an elephant effect, widen the hole slightly by using a thin round bar file.

Without those issues, the parts should rotate very smoothly with minimal friction.
Assembly
Note that the links have different lengths. So, place them in the right places by referring the number of dimples on them.


Other examples
You may also be interested in the models in my educational mechanical mechanism examples.
Find them in this collection:
https://makerworld.com/collections/15048577-my-educational-mechanism-models
Happy printing!
Acknowledgement
I got into gears thanks to K.$uzuki's amazing articles and YouTube videos. Many of the mechanisms shown in this series came from the introductions on his website. He also makes excellent gear models himself. This series wouldn’t have existed without his inspiration.
I learned a lot about technical detail of designing gear tooth profiles from Haguruma-No-Hanashi website. I’m truly grateful for that.
License (2026-03-13 updated)
- The 3D model(s) are licensed under Creative Commons Attribution 4.0 International. (unchanged)
- However, the text and images on this page are copyright reserved. (added on 2026-03-13)
Comment & Rating (10)