Hexapod





Print Profile(1)

Description
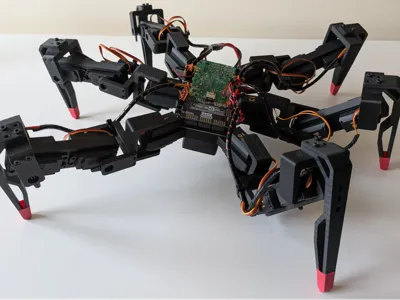
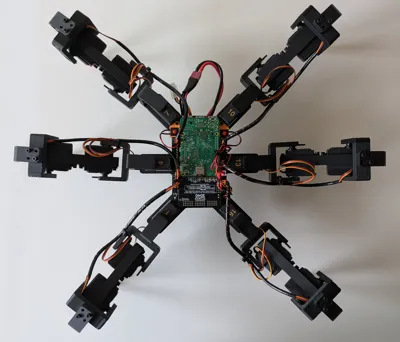
An open-source hexapod robot platform built from scratch and thoroughly documented —from mechanical design to motion control.
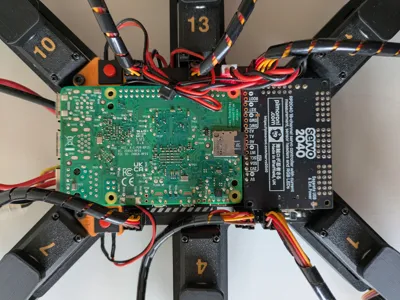
Alongside the physical build, the project includes simulation environments, a custom PCB designs, and integrations with ROS2, making it suitable for both learning and advanced experimentation in robotics.
Explore, modify, and extend every part of the system —from 3D-printed components to gait generation algorithms— in a fully open ecosystem.
License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (5)