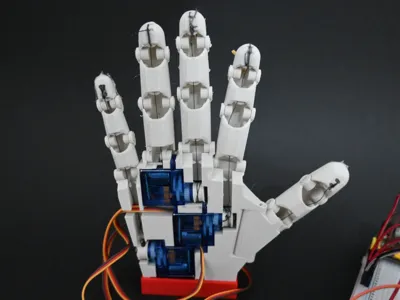
robotic hand

Print Profile(1)

Description
WARNING
This model is highly complex and still in development. I’ve made it public early due to community requests; however, it is not yet polished, and there is a high likelihood that issues will occur.
This project is intended for users who enjoy tinkering, modifying, and troubleshooting rather than those looking for a fully refined, plug-and-play experience.
I will be updating the model and instructions as I receive feedback and implement improvements.
Stl files
If a component does not have a note specify a quantity, you only need to print one.
The only parts that require multiple prints are:
- Screws
- Rubber band holders
- Pulleys
Printing
Due to how similar some parts look, it is strongly recommended to keep parts separated while printing and organizing.
Mixing parts between different fingers may cause assembly issues.
All components should be printed using a 0.2 mm nozzle and PETG filament.
Bill of materials:
I did not use Maker Supply, so this list contains generic component names.
Required:
- Breadboard
- 5V power supply
- Microcontroller
- Jumper cables (male-to-male)
- Jumper cables (male-to-female)
- Jumper cables (female-to-female)
- 5 × SG90 9g servos
- 5 × rubber bands
- Thin string
Optional but Useful:
- Super glue
- Tape
Tools:
- Pliers
- Screwdriver
In this video I go over how I designed it: https://youtu.be/7BZKeVtxVsY?si=-puwxjxGOh3w9YlT
License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (13)