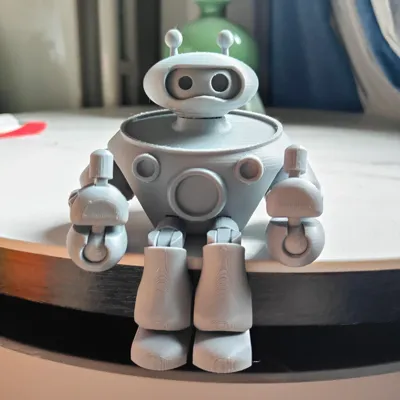
Articulated Cyclops Robot







Print Profile(2)


Description
Print in Place robot
If you are concerned about insufficient joint strength, please download the improved version of the model
2024.7.8 Update Information (Important)
After receiving feedback, I have re-improved the model, strengthening the spherical joints and increasing the leg clearance. I have also re-released a print profile to ensure joint strength while minimizing filament usage
To prevent joint breakage after printing, please carefully remove supports after printing
First, I want to apologize to the friend who failed to print two consecutive times
When I printed it myself with regular PLA, I did not encounter issues with the legs being too tight. Later, I also printed one with multi-color filament and indeed encountered issues with the leg tolerances being too small
This might be related to the different expansion coefficients of multi-color silk PLA, which is indeed something I had not considered
2024.7.6 Update Information:
Feedback has been received regarding insufficient strength at the arm joints
After checking the slicing, the connection points appear to be weak
Updated print information
Settings:
walls: 5
bottom shell layers: 6
This should solve the problem
Boost Me (for free)
O_0
License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (153)