SoftClaw - Minimalist Compliance Clamp





Print Profile(1)

Description
Overview
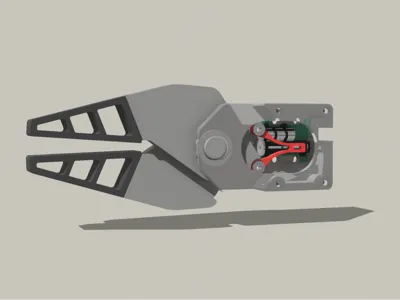
The SoftClaw is a lightweight, highly efficient functional clamp designed to achieve a perfect "soft-touch" grip on delicate objects.
By leveraging a clever compliant mechanism (flexible system), this design eliminates the need for complex gears or heavy linkages, allowing a single linear servo to actuate the entire mechanism smoothly. It minimizes hardware and relies almost entirely on 3D printed parts, making it an elegant solution for robotics, automation, or custom grabbers.
Key Features
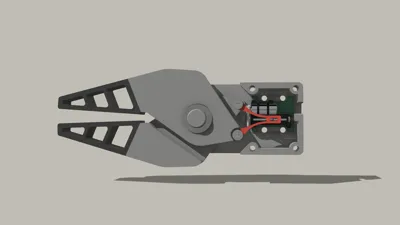
Single Servo Actuation: No gears, no backlash. The engineered flexible system splits the force evenly using just one actuator.
Interchangeable "Soft-Touch" Tips: Customize the grip to your exact needs. The claw tips can be printed in standard rigid materials or specialized flexible filaments.
High Efficiency, Low Hardware: Designed to maximize 3D printing capabilities while relying on minimal non-printed vitamins.
Material & Printing Guidelines
To get the best performance out of your SoftClaw, follow this specific material layout:
Main Structure: Print in PLA or PETG for general strength and rigidity.
The "LINK" (Red piece): Must be printed in PETG using a 0.2mm nozzle to achieve the precise tolerances and flexibility required for the compliant mechanism.
Claw Tips (The Pads):
- For standard use: PLA or PETG.
- For the ultimate Soft Grip: Print them in Foaming TPU (TPU Air) to create a soft, high-friction cushion that protects delicate surfaces from scratching or crushing.
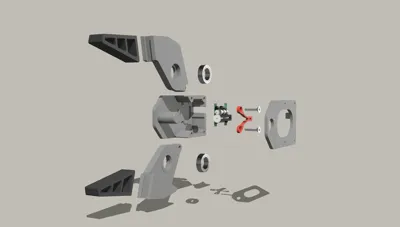
BOM (Bill of Materials) / Hardware Needed
Everything is 3D printed except for these few hardware components:
1x Linear Servo Motor
2x Ball Bearings
M2 Screws
Source Files Included: All parts are available in the provided zip file. I have also included the STEP files, high-res images, and engineering Drawings for easy remixing and reference.
Comment & Rating (0)