Finray Bionic Flexible Robotic Hand/Gripper













Print Profile(1)

Description
Open Source and Accessible | Anyone Can Learn Robot Gripping Technology
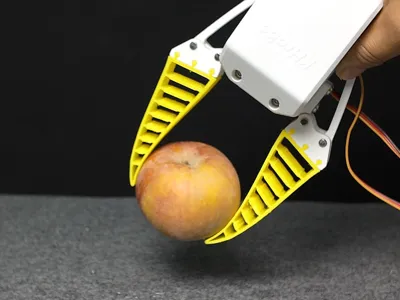
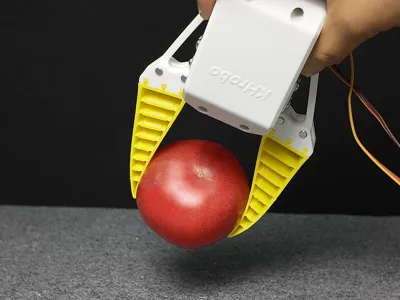
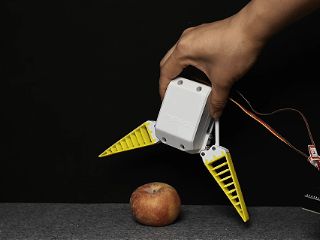
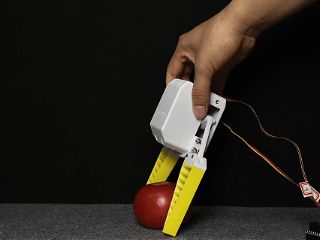
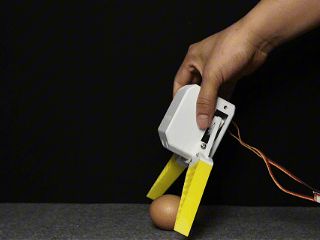
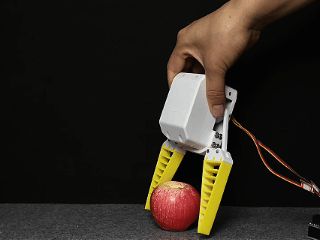
If you are looking for a small, compact, bionic flexible gripper that needs to achieve adaptive enveloping and non-damaging gripping functions, then this model is recommended for you!
1. When printing the Finray bionic flexible mechanical gripper: plate 2A uses Bambu Lab PLA filament, and plate 2B uses TPU 95A HF filament
For better printing results, I will list the tested parameters that yield better printing results for your reference. For those who don't understand, you can join the group: 956013278

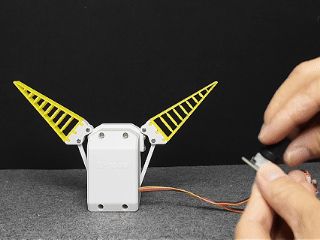
2. Besides the printed parts, other materials required for this project:
- Matching control body (compatible with three open-source grippers)
- Arduino UNO mainboard X1
- Expansion board x1
- DuPont jumper wires female-to-female 3P
- Potentiometer x1
- 12V 2A power supply x1
- Joint pivot x6
- Round head M3x10 screws x8
- Small Phillips screwdriver x1
3. Future open-source plans: Under-actuated bionic gripper
Under-actuated + flexible bionic gripper. Using the same control body, the three grippers are interchangeable
4. For the already open-source three-finger robot hand, please go to: Three-Finger Robot Hand - Free 3D Print Models - MakerWorld
License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (0)