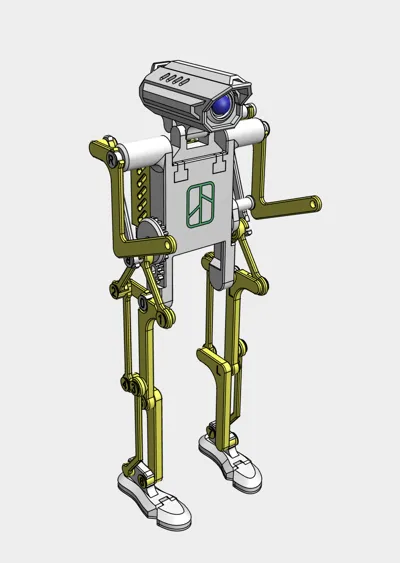
Bipedal Walking Mechanism (Robot Simulating Human Running Posture, Cyberpunk Style, Articulated Mechanical Structure)

























Print Profile(5)




Description
Boost Me (for free)
Follow and boost me your support is my greatest motivation
On May 19, 2026, I updated the trunk and base.
The main issue was that vertical printing caused the internal supports inside the rounded profile of the trunk’s main shaft to collapse, making the main shaft of the model unable to move smoothly.
I revised the teardrop‑shaped arc again to perfectly avoid internal support collapse. The main shaft now runs more smoothly without jitter, though internal support burrs still need proper finishing
On May 19, 2026, I updated the trunk and base.
The main issue was that vertical printing caused the internal supports inside the rounded profile of the trunk’s main shaft to collapse, making the main shaft of the model unable to move smoothly.
I revised the teardrop‑shaped arc again to perfectly avoid internal support collapse. The main shaft now runs more smoothly without jitter, though internal support burrs still need proper finishing


- Calibrate consumables and printer before printing to avoid large tolerances and unsmooth assembly
- Clean the supporting surfaces
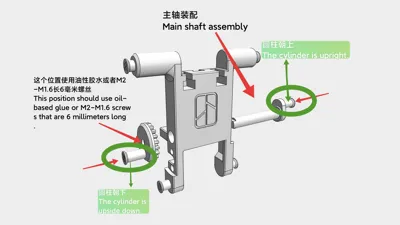
- Note that one M2×6mm screw is needed for installing the crank shaft
- Eight M3×6mm screws are required if printing the rickshaw walking mechanism
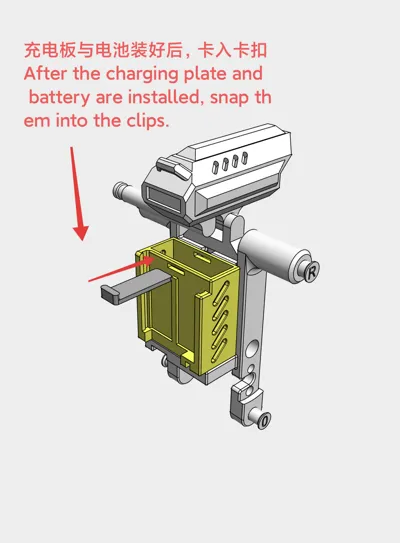
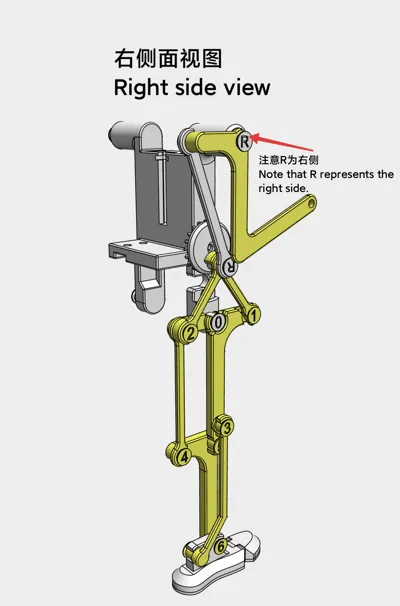
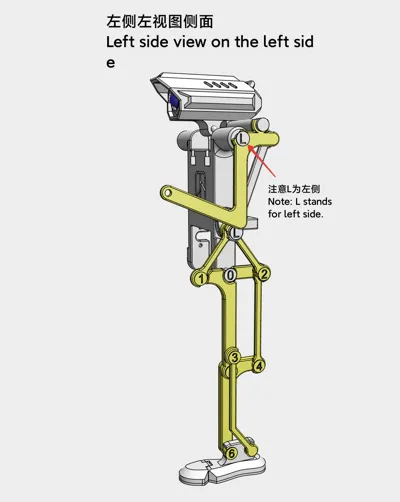
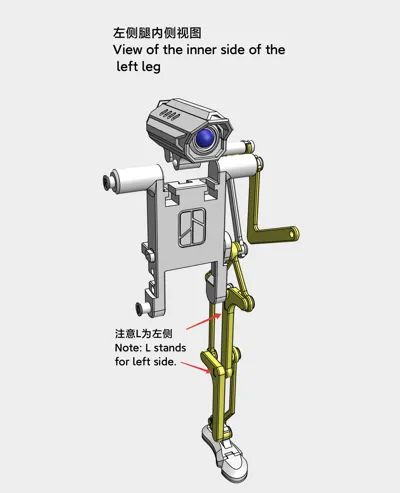
- Carefully check the assembly pictures during assembly
The drive crank main shaft is uneven Please cut off burrs and surface lines with a knife
1. Calibrate consumables and printer before printing to avoid large tolerances and unsmooth assembly
2. Clean the supporting surfaces
3. Note that one M2×6mm screw is needed for installing the crank shaft
4. Eight M3×6mm screws are required if printing the rickshaw walking mechanism
5. Carefully check the assembly pictures during assembly
6. The drive crank main shaft is uneven Please cut off burrs and surface lines with a knife
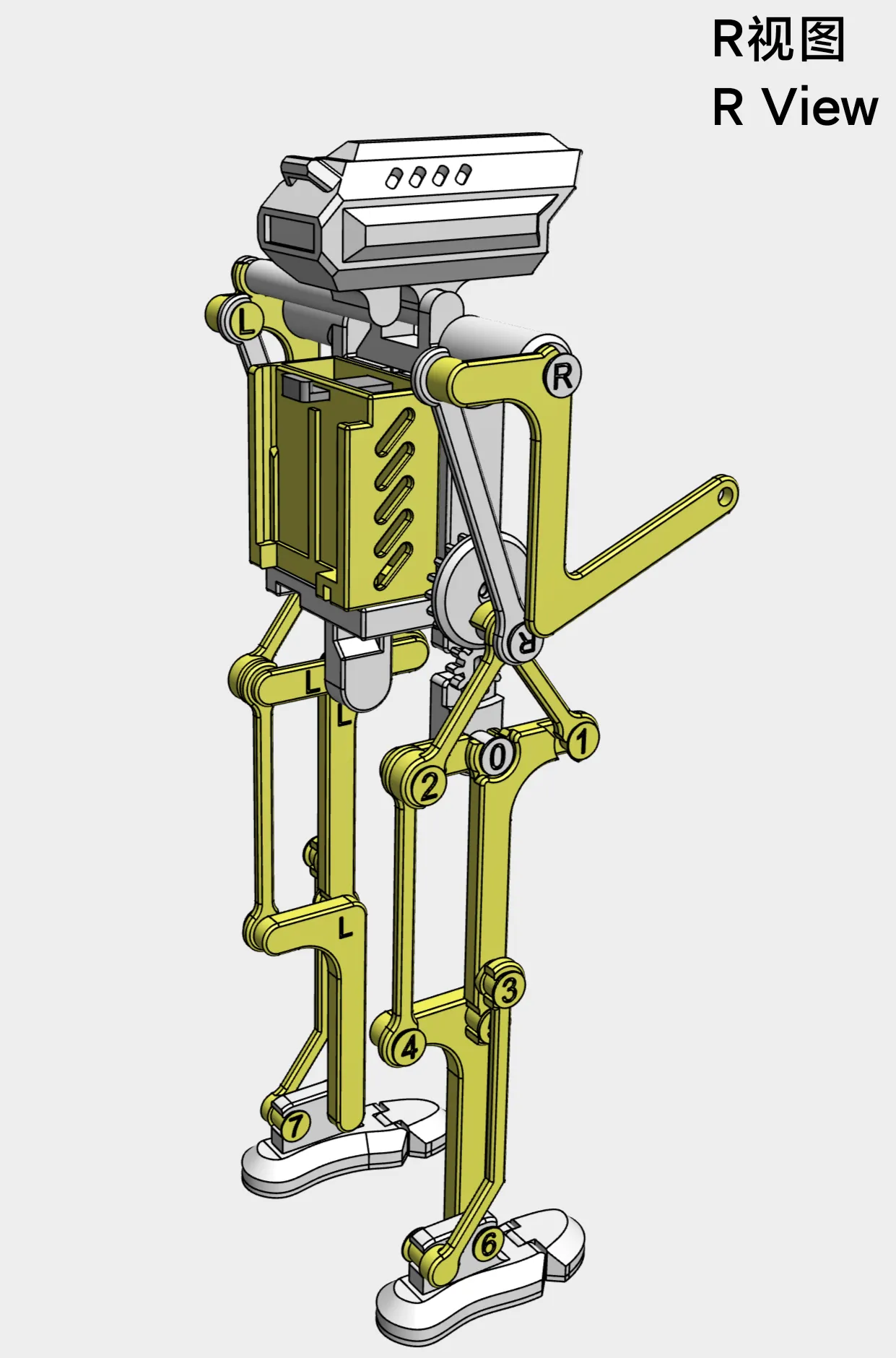
- This 3D printed articulated figure model highly restores real human walking postures It can lift legs and take steps swing arms naturally while walking and achieve synchronized head tilting movements Featuring full-body linkage with smooth and natural motions it perfectly replicates the physical details of human walking Built with precise movable structures it can achieve complete bionic walking effects right after DIY assembly
- This 3D printed articulated figure model highly restores real human walking postures. It can lift legs and take steps, swing arms naturally while walking, and achieve synchronized head tilting movements. Featuring full-body linkage with smooth and natural motions, it perfectly replicates the physical details of human walking. Built with precise movable structures, it can achieve complete bionic walking effects right after DIY assembly.
- I used Shapr3D sketches to simulate the moving structure
- I used Shapr3D sketches to simulate the moving structure.


| Chinese Spec | English Spec | Quantity | |
| M2 Round-Head Hex Socket Screw, 6mm Length | M2 Round‑Head Hex Socket Screw, 6mm Length | 1 |  |
| M3 Round-Head Hex Socket Screw, 6mm Length | M3 Round‑Head Hex Socket Screw, 6mm Length | 10 |  |
| Bambu Lab Rechargeable Power Kit Turntable Set, Maker's Supply Creative 3D Printing Model Components, ZH043 |  | 【Taobao】https://e.tb.cn/h.R3R2R52dAwqRgCM?tk=JfUL5uuJWim HU108 「Bambu Lab Rechargeable Power Kit Turntable Set Maker's Supply Creative 3D Printing Model Components ZH043」 Click the link to open directly or search on Taobao to open directly |
| Bambu Lab Rechargeable Power Kit Turntable Set, Maker World Creative 3D Printing Model Components, ZH043 |  |
Perspective view





Demonstration walking dynamic GIF image
Demonstration walking dynamic GIF image




The above covers all demonstration mechanisms with tests on various road surfaces
The above covers all demonstration mechanisms with tests on various road surfaces.
For any issues, please message me privately
Assembly Video [Bipedal Walking Mechanism (Maker World Bipedal Walking Mechanism, movable and walkable) - Bilibili] https://b23.tv/qPsOpjk
Documentation (12)












License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (3)