Commuting Electric Flipping Model Ornament









Print Profile(1)

Description
Foreword:
This model requires some knowledge of electronics and embedded systems to be successfully built and operated
A prerequisite skill is to know how to install the ESP32 board package for Arduino IDE
to successfully compile the program and upload it to the board
If you do not possess the above skills, please proceed with caution, as I'm afraid I don't have enough time or energy to provide installation tutorials
【3D Printed Electric Flipping Work/Commute Status Model Installation Tutorial】
The idea for this flipping work/commute status display was something I came up with myself, but then I searched and found that He Tongxue's team had already made a similar model
I printed He Tongxue's studio model to try it out and found that the servo compartments in their model were designed in reverse; it's almost impossible to find 9-gram servos with wires coming out from that side on the market
I have the most common "Huisheng" SG90 servos, metal gear MG90 servos, and Bambu Lab's official CyberBrick clutch digital servos
The wire outlets are all on this side, so none of them could be installed

Their model did not reserve space for circuitry nor did it provide a control software or hardware solution, so it was completely unusable
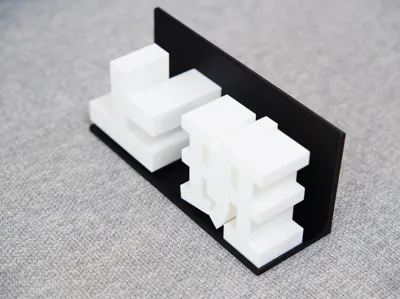
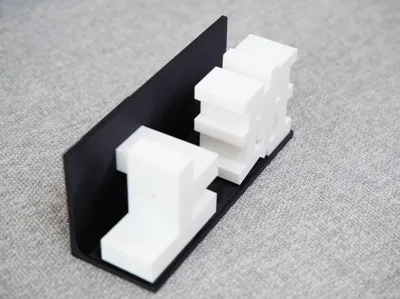
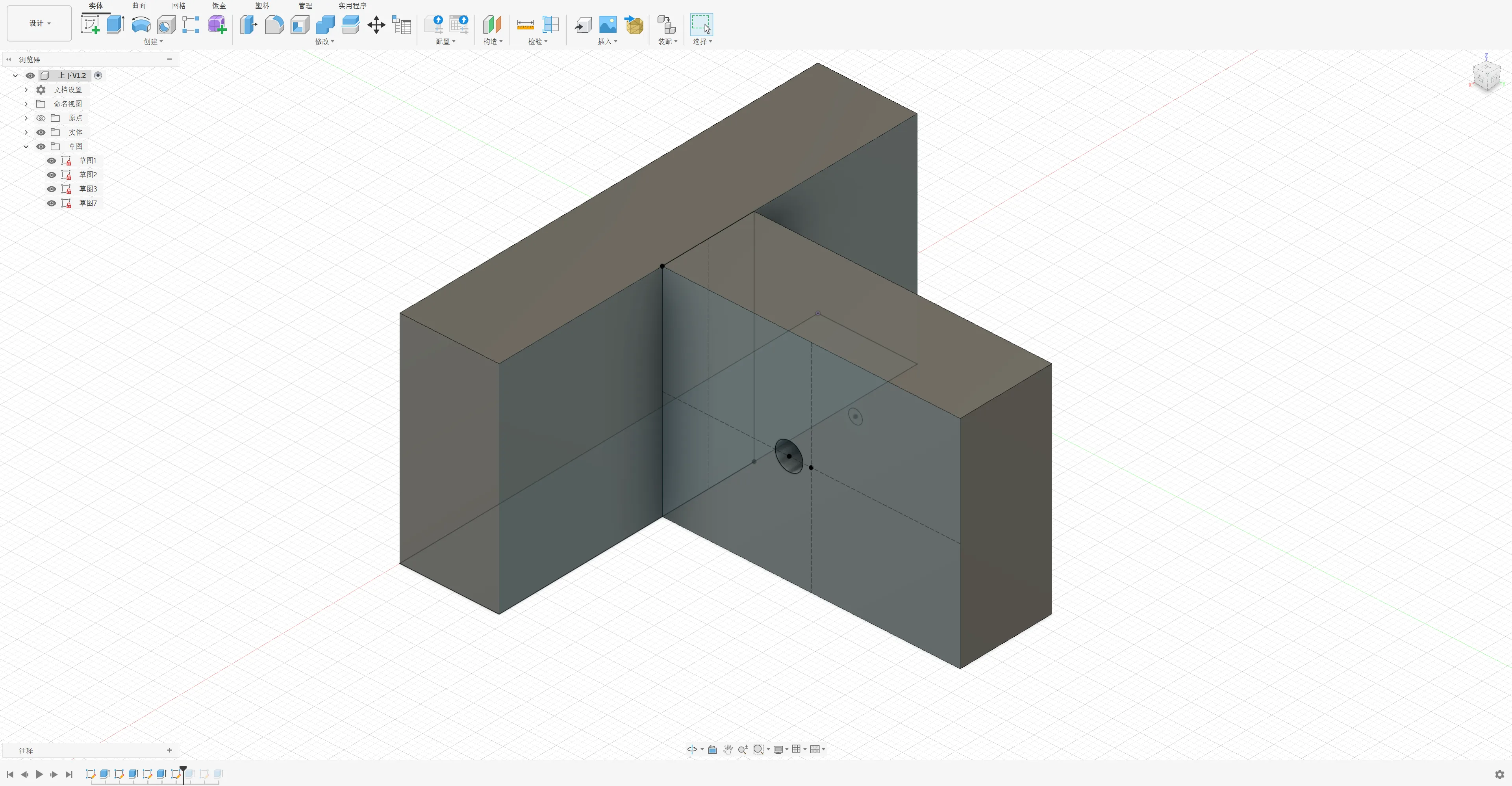
Therefore, I studied the structure of He Tongxue's studio model and designed the entire model myself from scratch
I corrected the servo compartment design and optimized several installation methods
Most importantly, I included the complete hardware control solution and designed the circuit board compartment and wire channels
Whether for programming or power supply, only one USB-C data cable is needed, and no electronic wires will be exposed
Every sketch and every dimension was drawn by myself
Below are the original files of my modeling steps, and I hope no one will come forward again to accuse me of stealing He Tongxue's model




The parts required for assembling this model are:
M3 * 10 countersunk screws X4
M3 nuts X4
ESP32C3 SuperMini development board (with pin headers soldered) X1

270-degree metal gear servo MG90D X1

Note: It is crucial to choose a 270-degree servo
Because it inherently needs to flip 180 degrees, cheap 180-degree servos on the market are highly likely to twitch at both ends
thus they might not be able to complete a full 180-degree flip reliably
By purchasing a 270-degree servo, you can utilize only the middle portion of its range, which will make it more reliable to implement, and the cost difference is negligible
Due to my limited programming and development capabilities, I have only developed a program that implements the most basic WiFi network configuration and servo rotation control functions
The program is attached below
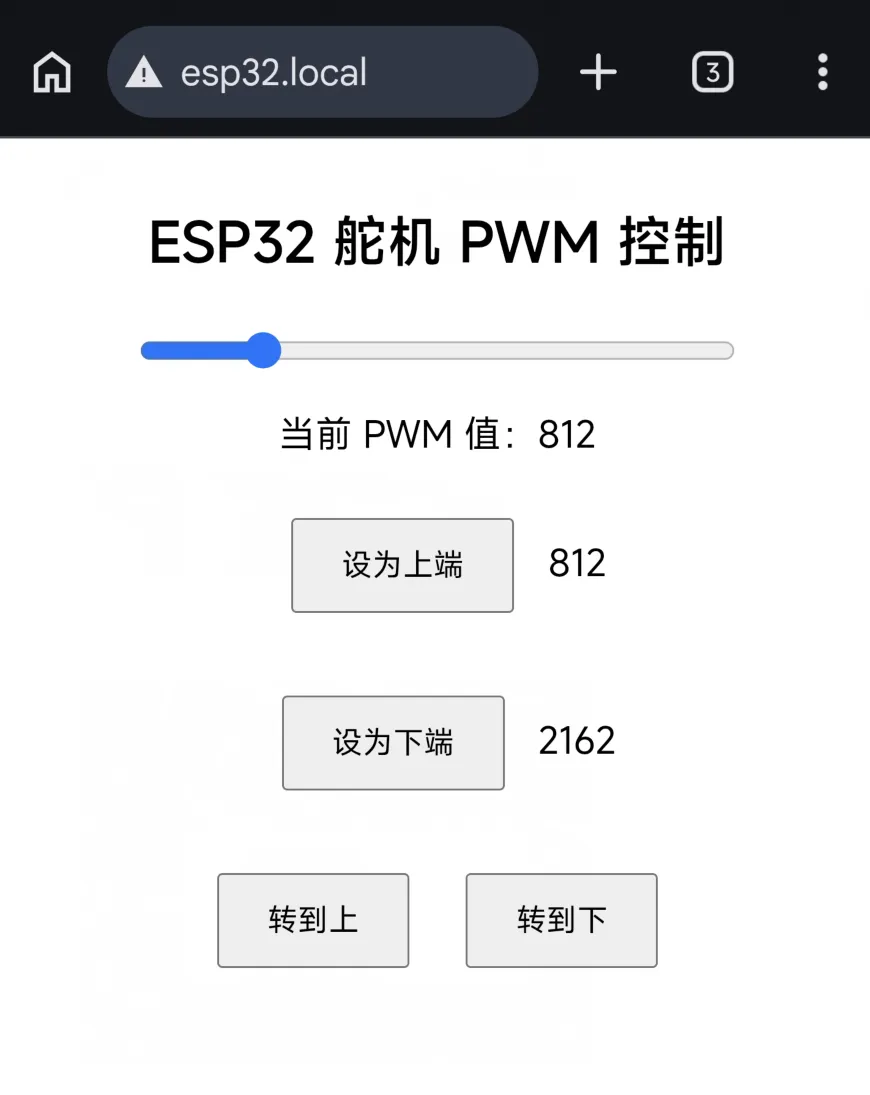
Since the hardware is completely open-source, further complex feature development is left to all you experts
Through further development, it can achieve NTP network timed automatic flipping, human body induction, or even video facial recognition to automatically flip when the boss approaches
or various other functions such as Blinker APP remote control
Documentation (1)
License
You may create derivative works based on this object, provided that all such derivative works are published exclusively on the MakerWorld platform and include proper attribution to the original creator. You may not share, upload, host, distribute, or publish this object—or any derivative work of this object—on any other digital platform, marketplace, or distribution channel. Commercial use of this object and any derivative works is strictly prohibited. This includes, but is not limited to, selling, renting, sublicensing, or using the object in any context in which you receive monetary compensation or other financial benefits.
Comment & Rating (0)