Robotic Gripper(Uses SG90 Servo)





Print Profile(1)

Description
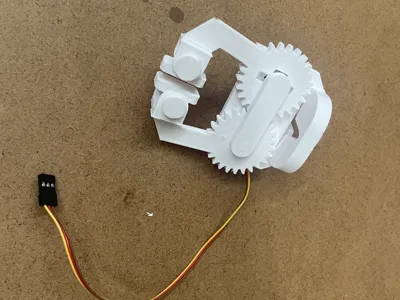
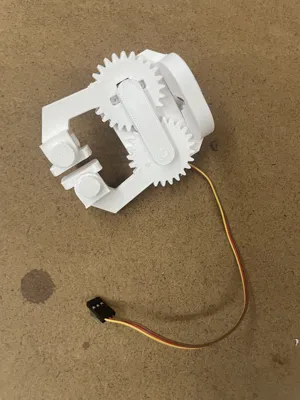
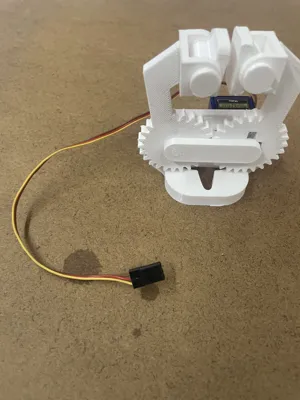
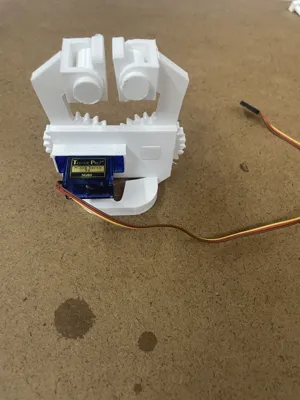
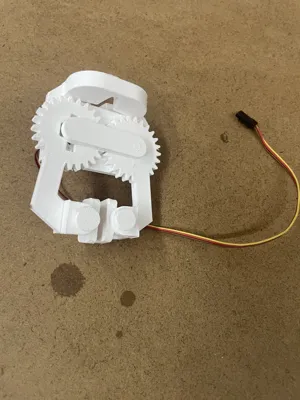
This is a design for a simple gripper/grabber/claw for a robotic arm. It needs no screws or inserts, only some superglue. It was designed for a robotic arm I made(hence the connector for an mg995 servo), but I thought it is still a good and simple design which you can adapt. I have made them all .step files for customisation. One thing which I haven't seen anywhere else is the actual end effector design, where both can rotate on the axle and are adaptive for different shapes or objects.
IMPORTANT - Making the model will require superglue, as I had to change the design a bit to ensure smooth printing. The entire process is detailed in the attachments.
ALSO IMPORTANT - This model works well with my printer and settings, but incase some of your parts don't fit id suggest changing the scaling in the slicer itself
Documentation (1)
License
You may create derivative works based on this object, provided that all such derivative works are published exclusively on the MakerWorld platform and include proper attribution to the original creator. You may not share, upload, host, distribute, or publish this object—or any derivative work of this object—on any other digital platform, marketplace, or distribution channel. Commercial use of this object and any derivative works is strictly prohibited. This includes, but is not limited to, selling, renting, sublicensing, or using the object in any context in which you receive monetary compensation or other financial benefits.
Comment & Rating (3)