Lotus 11 - Cyberbrick











Print Profile(4)




Bill of Materials



Description
Lotus 11 - Cyberbrick - 11 km/h of Pure Direct-Drive Racing
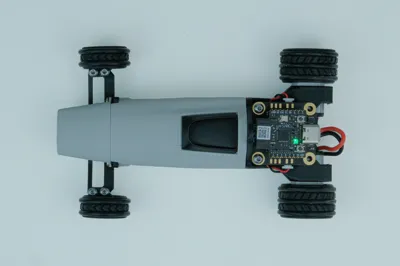
This small, fast, and intentionally simple RC car is inspired by the legendary race cars of the golden era of Formula 1. Clean lines, a low-profile silhouette, and uncompromising performance — reduced to what truly matters: speed.
🚀 Maximum Efficiency Through Direct Drive
Unlike many other models, this design completely eliminates 3D-printed gear reductions and transmission stages.
The motors transfer power directly to the wheels — with no power loss from gears.
The result:
- ⚡ Up to 11 km/h top speed
- 🔥 Extremely responsive acceleration
- 🧩 Fewer parts = less friction = more performance
- 🛠️ Simple assembly and high reliability
Thanks to this uncompromising direct-drive concept, this car is one of the fastest for its size — possibly even the fastest CyberBrick car on MakerWorld.
🎯 Focused on What Matters
This project stands for:
- Minimalism
- Performance
- Lightweight construction
- Easy maintenance
No unnecessary ballast. No complex gearbox. Just motor, wheels, and speed.
If you're looking for a compact, fast, and straightforward RC project that combines retro racing vibes with modern 3D printing technology, this model is for you. Super fast, super simple!
Improvement ideas and add-on suggestions are very welcome in the comments!
I’ll do my best to develop and implement your ideas during the next holidays.
All Maker's Supply parts required for the car are listed in the instructions.
Boost Me (for free)
Support a student maker and help bring the next concept to life! Every point motivates me to keep designing and improving. Thanks!
Documentation (1)

License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (150)