Modular Robotic Arm - Modular Robotic Arm



















Print Profile(1)

Description
Project Description
The system is a 4-axis (expandable) robotic arm designed entirely from scratch with a focus on extreme compactness: the geometry allows the structure to fold onto itself in a resting position, minimizing its footprint.
- Mechanics and Materials: Made of PETG for an excellent balance between thermal and structural resistance, especially concerning the planetary gears. I also experimented with PLA but strongly recommend PETG/ABS. The integration of a system of custom bearings ensures smooth rotation of the joints, eliminating vibrations and improving electronic precision. I chose to use only one motor per joint, and the bearing system prevents "undulations".
- Hardware Control (Arduino Mega): Low-level management is entrusted to an Arduino Mega, which handles motor control and sensor reading. I also added and managed encoders on each motor to know the positions even when the motors are off. Furthermore, I implemented an END stop on each arm.
Full-Stack C#: The software ecosystem is entirely developed in C#, for both backend logic (kinematic processing and serial communication) and the frontend interface, allowing for granular control and centralized data management.
the source code can be found here: https://github.com/andrealai83/robotic_arm
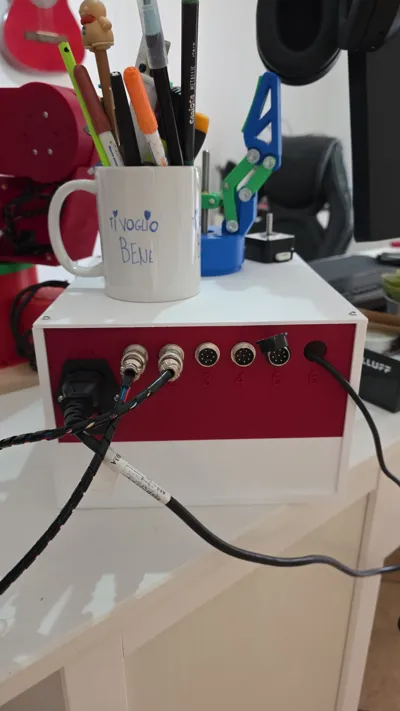
- Dedicated Control Unit: The arm is accompanied by an external control box that houses the electronics, an informative display for real-time telemetry and critical physical controls: Home button for calibration and Emergency Stop. The box can accommodate up to 6 drivers.
The project is still under development, so if you wish to contribute, you are welcome :)
Shopping list:
Arduino Mega: https://www.amazon.it/dp/B071W7WP35?ref=ppx_yo2ov_dt_b_fed_asin_title
6 Drivers: https://www.amazon.it/dp/B0CLLX35LJ?ref=ppx_yo2ov_dt_b_fed_asin_title
4 NEMA 17 stepper motors: https://www.amazon.it/dp/B09HX26ZHQ?ref=ppx_yo2ov_dt_b_fed_asin_title&th=1
36 ball bearings: https://www.amazon.it/dp/B0BJ836RX6?ref=ppx_yo2ov_dt_b_fed_asin_title
m4 screws of various sizes
100 M3 x 5 x 4 insert nuts https://www.amazon.it/dp/B0CS6VZYL8?ref=ppx_yo2ov_dt_b_fed_asin_title&th=1
4 bearings 50x65x7mm : https://www.amazon.it/dp/B09HX26ZHQ?ref_=ppx_hzsearch_conn_dt_b_fed_asin_title_3
2 bearings 30 x 17 x7 :
License
You may create derivative works based on this object, provided that all such derivative works are published exclusively on the MakerWorld platform and include proper attribution to the original creator. You may not share, upload, host, distribute, or publish this object—or any derivative work of this object—on any other digital platform, marketplace, or distribution channel. Commercial use of this object and any derivative works is strictly prohibited. This includes, but is not limited to, selling, renting, sublicensing, or using the object in any context in which you receive monetary compensation or other financial benefits.
Comment & Rating (11)