Robotis OMX Leader Arm thumb-side handle modification













Print Profile(1)

Description
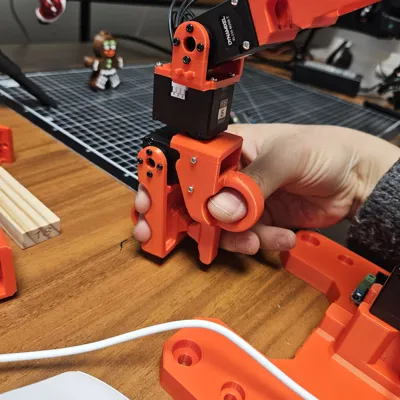
When using the Robotis OMX Leader Arm, the most concerning aspects were the excessive bending of the thumb and grip stability of the handle.
In the existing structure, long-term use led to the thumb bending more than necessary, or unstable force transmission during precise operations.
In this modification:
- The handle's shape was improved to naturally guide the thumb's angle and
- Stability was enhanced by adding a structure that physically restricts excessive bending.
- As a result, hand strain during gripping is reduced, and operational accuracy and consistency during teleoperation have improved.
This is not just a simple cosmetic change but a custom modification case that considered actual usage environments with ergonomic improvements,
enabling the OMX Leader Arm to be operated more comfortably and reliably.
License
You may create derivative works based on this object, provided that all such derivative works are published exclusively on the MakerWorld platform and include proper attribution to the original creator. You may not share, upload, host, distribute, or publish this object—or any derivative work of this object—on any other digital platform, marketplace, or distribution channel. Commercial use of this object and any derivative works is strictly prohibited. This includes, but is not limited to, selling, renting, sublicensing, or using the object in any context in which you receive monetary compensation or other financial benefits.
Comment & Rating (0)