Search models, users, collections, and posts
SO101 Arm + Wrist Yaw (6DoF)
IP Report



Print Profile(2)

Version 2
Designer
3 h
1 plate

Version 1
Designer
3.2 h
1 plate
Open in Bambu Studio
Boost
54
129
1
2
123
21
Released
Bill of Materials
List other parts
- Feetech STS3215 servo motor x 1: 30kg.cm (12V)
Description
👋 Introduction
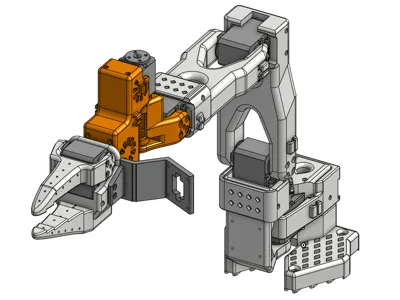
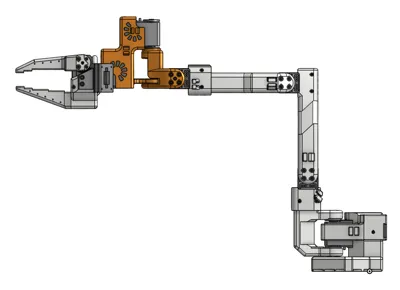
Add a wrist yaw to the LeRobot SO101 arm, making it 6DoF. This model consists of two printed parts (orange), and the designs are compatible with the original SO101 arm.
There are two versions. The older version (V1) is more chunky, and the total wrist length is about the size of the upper arm. The newest version (V2) is more compact and has a shorter wrist length, which improves the manipulability.
📐 CAD model
💻 Software
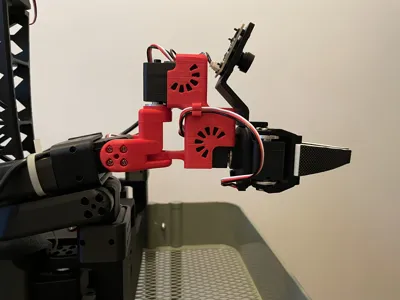
🔧 Assembly guide (for V2)
ℹ️ This model does not include the original SO101 arm. You can either print one or buy one. Refer to the official [GitHub].
Disassemble joint 5 and joint 6 of your SO101/100 arm (if you haven't assembled the arm, follow the assembly steps of the SO101 arm up to joint 4 [Link]), and then continue with the steps below here:
| 1 | Slide motor 6 (motor 5 in SO101) to the lower slot of the front part, and secure it with 4 M2x6mm screws |  |
| 2 | Slide motor 5 (new motor) to the upper slot of the front part, and fasten it with 2 M2x6mm screws |  |
| 3 | Connect cables to motor 6 (make sure you have configured the motor id using tools from [Bambot] before connecting cables) |  |
| 4 | Align the front part with the back part along the axis of rotation |  |
| 5 | Fasten motor 5 with 4 M3x6mm horn screws |  |
| 6 | Manage cables |  |
License
This user content is licensed under a
Creative Commons Attribution-Noncommercial-Share Alike
Comment & Rating (1)