3510 Cycloidal Gear Actuator 1:22 under 50$!



























Print Profile(1)

Description
Hello everyone!
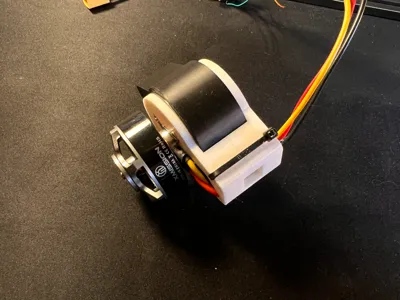
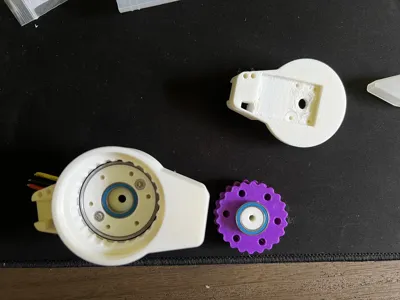
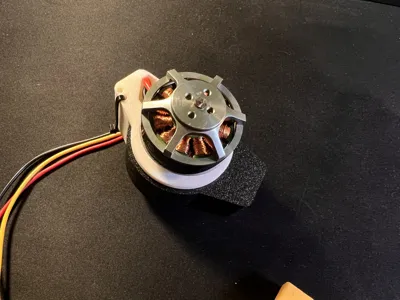
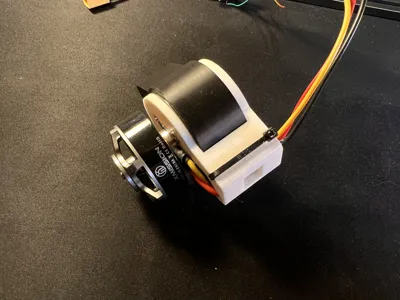
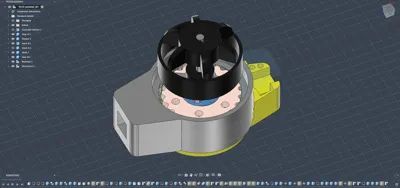
I present a simple robotic joint with a cycloidal gearbox - 1:22, based on a BLDC 3510 motor with space for an AS5047P encoder.
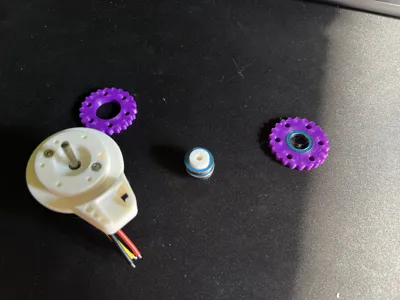
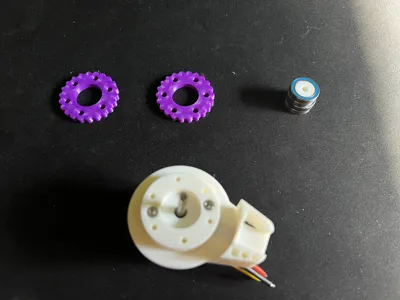
The design requires a few additional components, such as replacing the motor shaft with one measuring 56 mm x 4 mm. In addition, we need 6 bearings – 4 small and 2 large:
- 12x18x4 -> 4 pieces (shaft)
- 35x47x7 -> 2 pieces (output)
We also need a few M2 and M3 screws.
A good prototype for building a small robot or for precise motor control using the FOC library.
Happy robotics!
License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (2)