Search models, users, collections, and posts
DOGlove
IP Report




GIF
GIF
Print Profile(1)

0.2mm layer, 6 walls, 25% infill
Designer
18.5 h
6 plates
Open in Bambu Studio
Boost
23
51
8
3
84
9
Released
Description
Welcome!
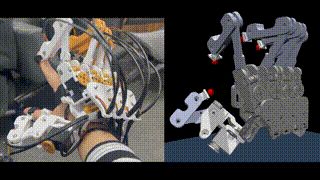
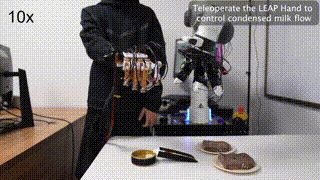
DOGlove is a low-cost, open-source haptic+force feedback glove designed for dexterous manipulation and teleoperation.
It can be assembled iwithin a few hours for under 600 USD and features 21-DoF motion capture along with 5-DoF haptic force feedback.
Check out some useful links below to learn more:
🌐 Website | 📄 Paper | 𝕏 Tweet | 🧩 Documentation
License
This user content is licensed under a
Creative Commons Attribution-Noncommercial-Share Alike
Comment & Rating (8)