Search models, users, collections, and posts
N-DOF: The Modular Robotic Arm
IP Report








Print Profile(1)
0.2mm layer, 2 walls, 15% infill
13.8 h
2 plates
Open in Bambu Studio
Boost
473
1065
17
22
589
119
Released
Description
N-DOF: The Modular Robotic Arm
This project uses connectors that are compatible with Modular Mounting System (MMS) and GoPro to join motorized robotic modules.

Features
- Modular: Ideal for flexible use and re-use. Try different arm designs without having to re-print parts. Disassemble and reassemble with ease.
- Limitless: Print the same part multiple times and chain them together. N-DOF = "N Degrees Of Freedom".
- Extensible: Have a motor or actuator you want to use in your own robot? Design a joint with GoPro mounts separated by 30 mm... Now it is N-DOF compatible!
- Compatible: There are a huge number of mounts for various objects that are already compatible with N-DOF. Search for "Modular Mounting System" or "GoPro".

Included Modules
- The included modules use print-in-place joints to keep part count low. They require supports when printing and a little force to move for the first time.
- Included modules use NEMA 17 stepping motors.
- The only non-printed parts required are M3 bolts to mount the motors.
If you are thinking of designing a module that is compatible with N-DOF, these features are not a requirement.
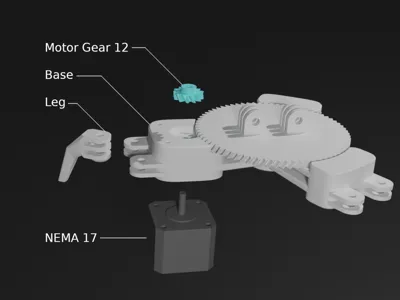
Base

- Gear ratio = 6:1
- Support blockers when slicing may help support removal.
- If greater stability is required, print some MMS arms to spread the legs out further.
- 2 x M3 bolts required to mount NEMA 17.
- 6 x legs.
- 1 x motor gear (with 12 teeth).
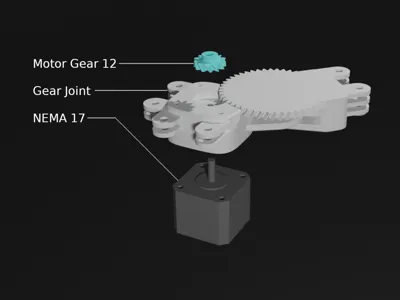
Gear Joint

- Gear ratio = 4:1
- Support blockers when slicing may help support removal.
- This joint has an asymmetric range of motion: -60 deg to 150 deg.
- 3 x M3 bolts required to mount NEMA 17.
- 1 x motor gear (with 12 teeth).
Swivel Joint

- No gearing.
- This could be improved using planetary gears.
- 4 x M3 bolts required to mount NEMA 17.
Notes
- Regular PLA might not be strong enough for the M5 bolts. I used PolyMax PLA and have had no issues.
- If extending the arm to great lengths, be sure to attach the base to a desk with a clamp so it doesn't tip over.
- OpenSCAD code can be found at https://github.com/keeeal/n-dof
License
This user content is licensed under a
Creative Commons Attribution
Comment & Rating (17)