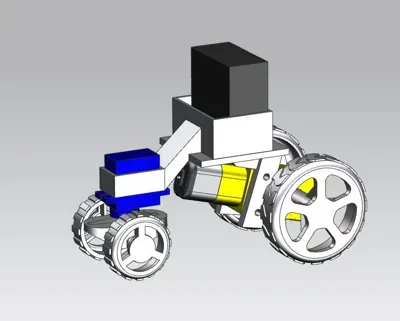
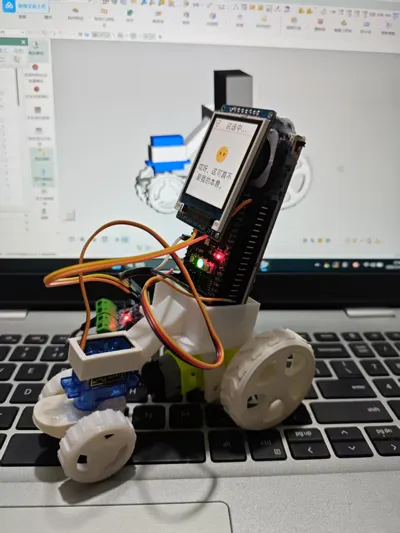
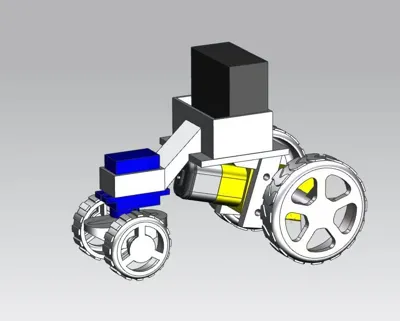
XiaoZhi AI walking base, can control XiaoZhi's walking and turning movements









Print Profile(0)
Description
XiaoZhi AI Walking Base, capable of controlling XiaoZhi's walking and turning movements
I. Components:
1. SG90 servo, 2. Dual-axis TT DC geared motor, 3. Motor H-bridge dual-channel control module, 4. XiaoZhi accessories (details omitted)




II. Functionality:
Control of the motor and servo
III. Precautions
1. Assembly of components required, 2. Components connected with adhesive (follow diagram)
IV. Firmware:
Several versions available, flash according to your needs
File shared via online storage: XiaoZhi control firmware-walking.zip
Link: https://pan.baidu.com/s/1krFXx3FBhKsOIz4nXEcR1Q Extraction code: jk88
V. Control Modifications:
1. Minor program issues, modification omitted: (Motor control module dual input terminal wiring changed to GPIO18 and 19), 2. Modify in the backend
Commands:
Power-on default servo position is 90 degrees. In the absence of commands, the position remains at 90 degrees. Upon hearing a command such as “turn left,” the servo rotates to 70 degrees for 2 seconds, then returns to its original position. Upon hearing a command such as “turn right,” the servo rotates to 110 degrees for 2 seconds, then returns to its original position.
Upon hearing a command indicating a stop, both the motor and light are deactivated;
Upon hearing a command indicating forward movement, the light is deactivated, and the motor is activated for 8 seconds, after which both devices are deactivated. This constitutes one step forward;
Upon hearing a command indicating backward movement, the light is activated, and the motor is deactivated for 8 seconds, after which both devices are deactivated. This constitutes one step backward.
Upon hearing the command “dance,” the servo oscillates between 60 and 120 degrees five times, concluding at 90 degrees before executing one step forward and one step backward.
A command such as “move forward left” indicates movement two steps forward at the leftward angle, followed by a return to 90 degrees. This logic applies similarly to “move forward right,” “move backward left,” and “move backward right.”
A “turn around” command executes two steps forward while turning right, followed by two steps backward while turning left, repeated once, and finally returning to 90 degrees.
License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (0)