42 Stepper Motor Helical Planetary Gearbox 6:1









Print Profile(1)

Description
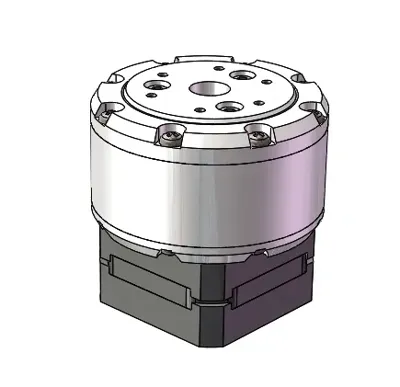
Compact Design
Miniature planetary gearbox for 42 stepper motor
Gear ratio 6:1
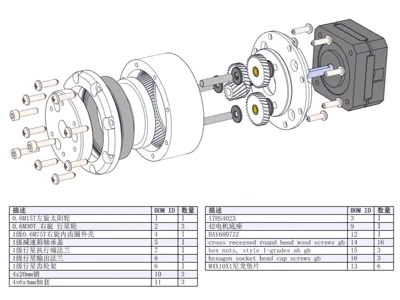
Module 0.6M, sun gear 15T, internal gear 75T, helix angle 20°
Outer diameter only 58mm Length 34mm
Easy to Expand
Equipped with a 6-hole end face flange, various actuators (grippers/suction cups/electromagnets, etc.) can be freely added
Design Data
The zip package includes BOM table + purchase link + STEP assembly drawings
Safety Design
The motor output shaft gear is designed as a consumable part to protect the planetary gear and internal gear safety. Once the torque is overloaded, this gear will automatically slip and wear. If possible, please print several more, and replacement is convenient
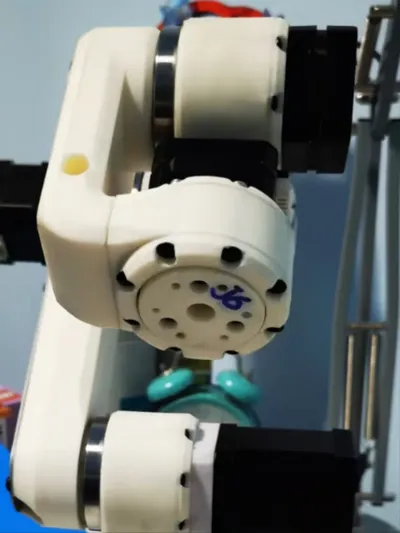
Application Scenarios
Used for the J6 joint at the end of the robotic arm, in a light load environment
Material Properties
When the printing material is PLA-FC, the motor current should be small and stable, and excessive heat generation will cause deformation of the gearbox structure
When the printing material is ABS, the interlayer bonding strength will be reduced, and the installation gap of the nut hex hole needs to be increased (process---global---quality---XY hole size compensation---+0.15)
Simple Standard Parts
1 x 6807 bearing
3 x inner 4 outer 6 length 4 shaft sleeves (self-lubricating)
3 x outer 4 length 20 cylindrical pins
6 x inner 4 outer 10 nylon washers (self-lubricating)
3 x M3 hex nuts
3 x M3 socket head cap screws
Printing Parameters
Material PLA-FC or ABS
Layer height 0.2
Outer wall 4 layers
Sparse infill 40~60%
XY hole size compensation initial default +0.05 (adjust according to actual situation)
XY outer size compensation initial default -0.05 (adjust according to actual situation)


License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (8)