Robotic Wrist









Print Profile(0)
Description
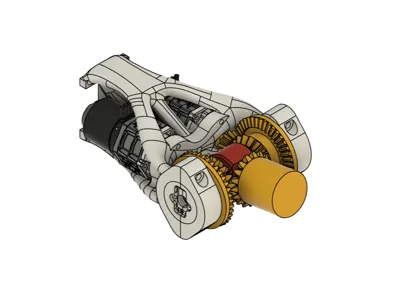
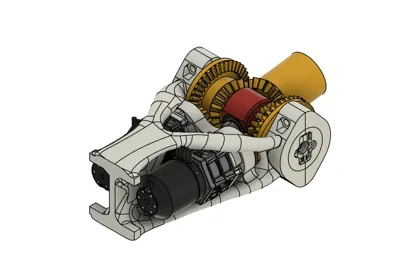
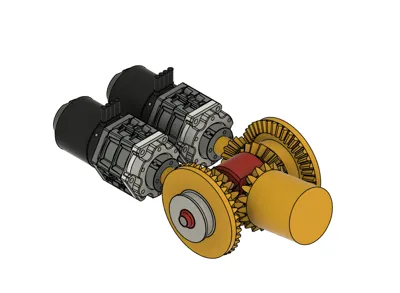
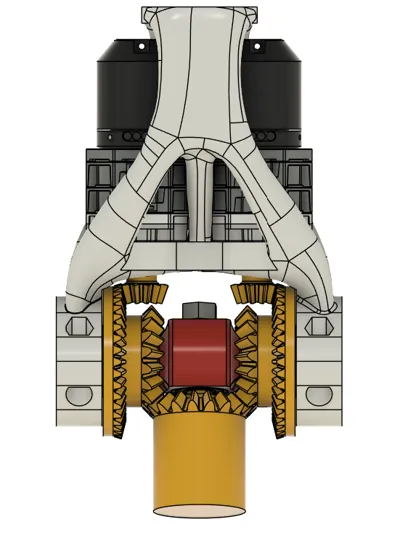
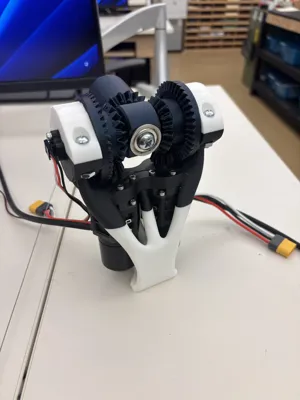
High-Performance 2-DOF Robotic Wrist
This robotic wrist utilizes a differential control scheme powered by dual NEO 550 brushless motors. The result is a mechanism that is incredibly fast (see GIF @20% output power), exceptionally powerful, and highly precise, capable of maintaining accuracy to within 0.5 degrees. The geometry of the parts has been heavily optimized to maximize structural strength while keeping filament usage to a minimum.
Material Recommendations & Performance:
- Prototyping: Standard PLA works perfectly for initial testing and light-duty tasks. However, please note that under heavier loads (5+ lbs), PLA gear teeth will begin to deform.
- Final Assembly: To reduce backlash and unlock the full potential of this design, engineering-grade materials are strongly recommended. My final build uses PA-HT for the main body and PPA-CF for the gears.
- Payload: When printed with these advanced materials, the assembly holds up exceptionally well and boasts a lift capacity of approximately 10 lbs.
⚠️ Safety Warning: Please keep your hands and fingers perfectly clear of the gears during operation. This mechanism moves extremely fast and generates serious torque! Like serisouly its VERY VERY FAST can move full range in about a ¼ second or less at full power. The GIF is only 20% power for refrence.
License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (0)