Search models, users, collections, and posts
Atom-X Robot
IP Report



Print Profile(1)

0.2mm layer, 4 walls, 15% infill
Designer
19.5 h
4 plates
Open in Bambu Studio
Boost
2
10
0
0
8
1
Released
Description
Content has been automatically translated.
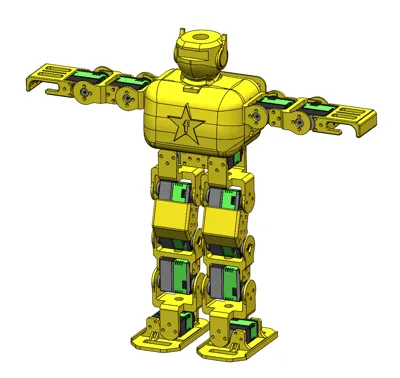
Fashionstar Atom X: 17-DOF Bipedal Robot
For details, please refer to the Product Datasheet - Fashionstar Technology Wiki
- Project Name: Fashionstar Atom S 10-DOF Open Source Robot Kit
- Introduction: This is a fully open-source 17-DOF humanoid robot designed to provide a low-cost, highly playable hardware platform for robot enthusiasts. The core power comes from 17 Fashionstar RA8-U25H-M bus servos, combined with a minimalist electronic architecture, allowing you to unleash more imagination.
- Robot Architecture: Bus servos + RUC-01 adapter board (power/communication) + Seeed Studio XIAO main control (optional Grove expansion) + 3D printed structural parts.
- DOF Configuration: The entire machine has 17 DOFs, covering head, arm, and leg joints.
- Joint Actuators: Fashionstar RA8-U25H-M bus servo motors ×17 (supports bus communication, simple wiring).
- Robot Skeleton: Full 3D printed structure, providing STP/STL file downloads. If damaged, it can be reprinted at any time, or the appearance can be redesigned as needed.
- Control and Interfaces: USB Type-C (PC debugging), UART serial port (main control communication), bus servo interface, Grove expansion interface (optional).
License
This user content is licensed under a
Creative Commons Attribution-Noncommercial-Share Alike
Comment & Rating (0)