WalkingTable
























Print Profile(2)


Bill of Materials















Description

[Introduction]
My rendition of the Walking Table. A fun little model based off of the strandbeest mechanism. This model utilizes the Cyberbrick hardware to come to life. Featuring a industrial inspired controller.

The model itself has gone through several iterations.
[Updates]
11/11/2025 - There's a known error in the documents in Step 1. I can't easily update the documents themselves right now because the software I used to create this version of the manual, with the animations, I don't have a license to anymore at the moment. Part of the joys of subscriptions, you know.
I've added notes below, but just keep it in mind. The bearings should be inserted into the gears. They are illustrated on the wrong side of the gear, in the documentation. Please accept my apologies for that.
I've also updated the print profile to fix an issue in there with one of the links being misplaced off of the build plates. Not sure exactly what happened there.
Lastly, did some videos to show it off, and added those at the top!
[Hardware & Filament]
Featured Filaments:
- Bambu PLA Onyx Black Sparkle
- Bambu PLA Crimson Red Sparkle
- Bambu PLA Iridium Gold Metallic
- Bambu PETG Transparent Clear (Used for the LED indicator on the controller)
Hardware:
Some of the required hardware will be part of the Cyberbrick kit. The hardware used specifically from the kit will be listed separately below for your reference.
- 1 Cyberbrick Kit
- 105 x M3x8 Self Tapping Screws
- 20 x M3x20 Self Tapping Screws
- 36 x M3x4x8 Shoulder Machine Screws
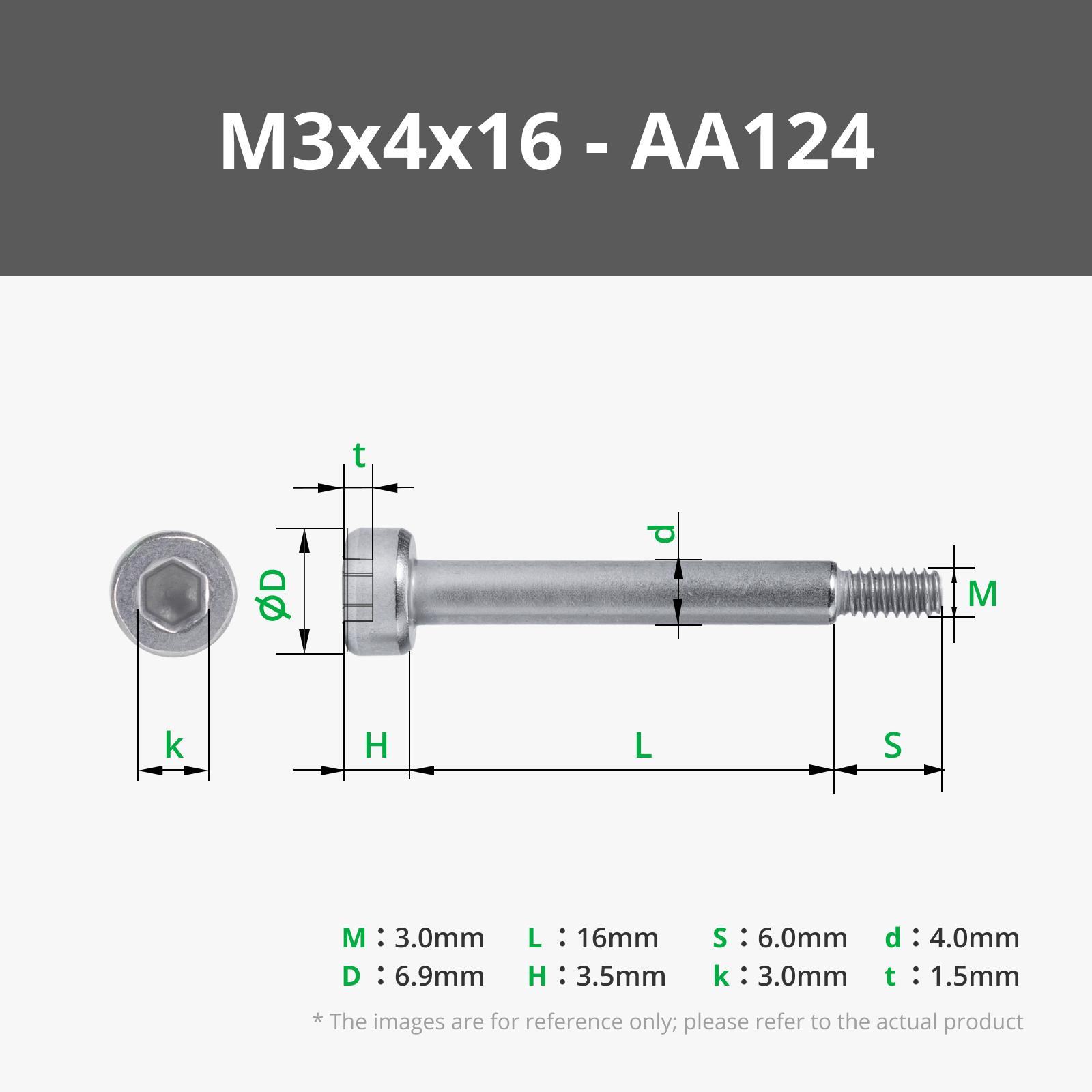
- 36 x M3x4x16 Shoulder Machine Screws
- 13 x M2x8 Self Tapping Screws
- 18 x MR128ZZ Bearings
- 2 x 030 Mcro DC Motors (Please note, there's 4x030 motors used in total, two of which are part of the standard Cyberbrick Kit)
- 4 x Gear Reduction Sets (1:85 or 1:105 recommended)
- 4 x 6x2 Magnets
- 2 x 1to2 Terminals
- 1 x Single-Axis Joystick Module
- 2 x 50mm wire with SH1.0 connectors
Hardware used from the Cyberbrick Kit:
This is the hardware we'll use specifically from the kit. Purchasing the kit should be slightly cheaper then buying the needed components separately.
- 2 x Multi-Function Controller Core
- 1 x Remote Control Receiver Shield
- 1 x Remote Control Transmitter Shield
- 1 x Power Switch Module
- 1 x Single-Axis Joystick Module
- 2 x 100mm Wire with 3Pin SH1.0 Connectors
- 1 x 3x1.5V AAA Battery Case with XH2.54 Connector
- 1 x 14500 7.4V 800mAh Li-ion Battery
- 1 x 7.4V Lithium Battery Charger with XH2.54 Connector
- 2 x 030 Micro DC Motor
- Lubricant Grease
A few notes on the hardware. We're using 4 of the 030 Micro DC motors, two of which are included in the beginner kit. The controller will make use of two single axis joystick modules too, but only one is included in the kit.
[Assembly]
The assembly guide is a work in progress and will be updated over the next couple of days. Here's the first section, covering the main assembly. A PDF version will be added when the full assembly guide is completed.
[The Main Table]

There are 3 versions of the leg frame. The outer, mid, and inner. The mid frame has wider mounting holes, and the inner frame has mounting holes for the motor. You should have 2 of each, for 6 total.
(Warning: There's an error in the image that shows the bearing on the wrong side of the big gear. The bearing should be inserted into the big gear, not sit between itself the gear and the frame.)

(Warning: There's an error in the image that shows the bearing on the wrong side of the big gear. The bearing should be inserted into the big gear, not sit between itself the gear and the frame.)















[The Controller]






-------
If you like my work, consider showing your love by Buying me a coffee. Additionally, if you're looking to sell prints of my design, please check out my Patreon page for more information.
Documentation (2)

License
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including - but not limited to - remixes of this object, and hosting on other digital platforms). The objects may not be used without permission in any way whatsoever in which you charge money, or collect fees.
Comment & Rating (181)