When designing CyberCrawler, I wanted to create something that felt halfway between a small RC car and a walking robot creature.
Instead of focusing on overly complex mechanics, I wanted to make a robot that is fun to watch, fun to control, and approachable for makers who want to explore robotics without advanced tools or soldering.
CyberCrawler can switch between two movement modes:
Crawl Mode

The robot walks using four legs, each with only 2 degrees of freedom.
Keeping the structure simple was an intentional design choice — fewer moving parts means easier assembly, easier maintenance, and more accessible code for beginners.
It supports multiple gaits including:
* Trot
* Walk
* Ripple
* Single-leg gait
Vehicle Mode
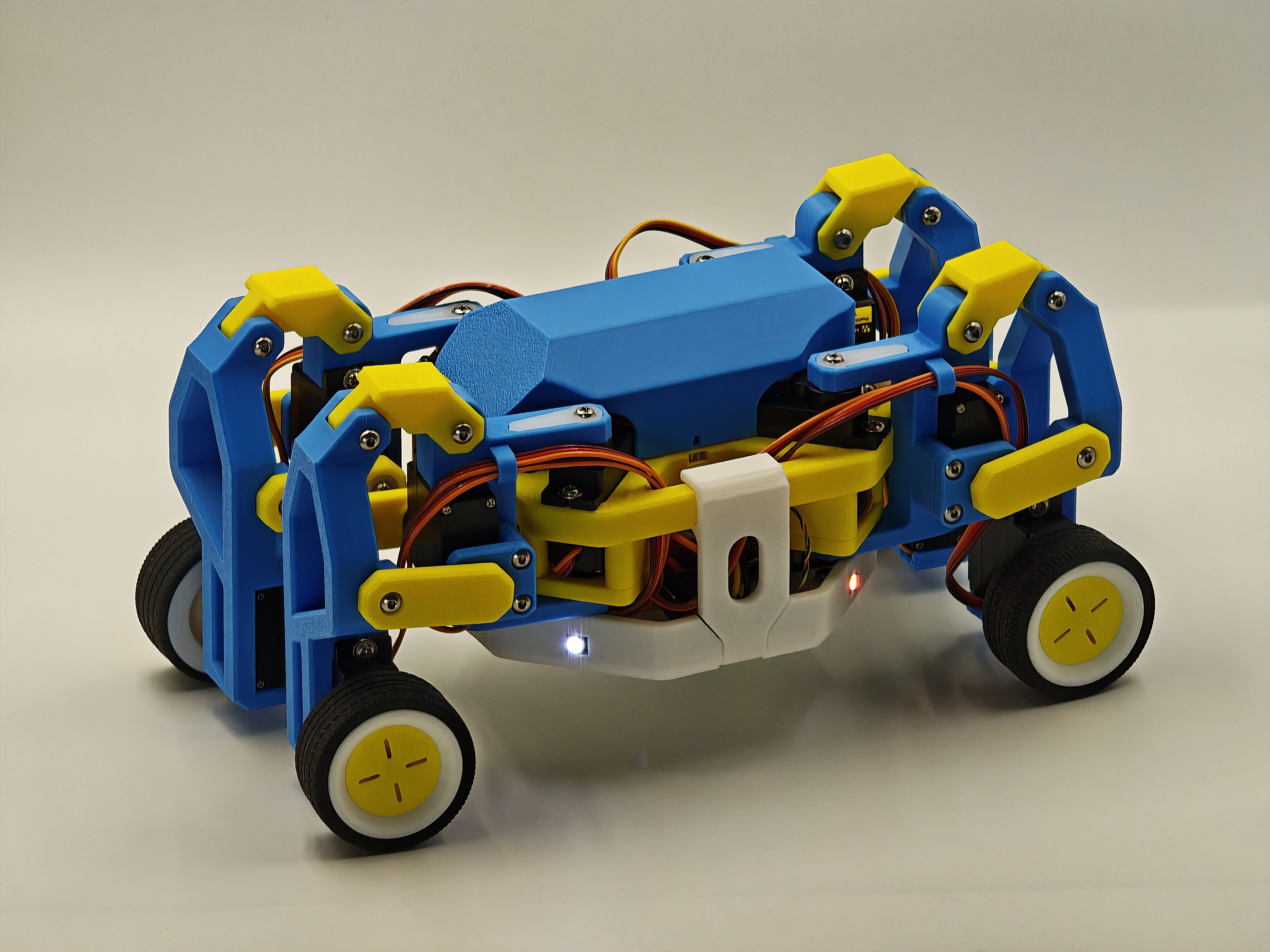
The legs fold into a wheeled driving configuration, allowing the robot to move more efficiently like a small RC vehicle.
The steering system combines Ackermann steering geometry with differential steering, which gives the robot surprisingly smooth turning behavior for such a compact design.
One of the most interesting parts of this project was balancing simplicity and personality.
I didn’t want it to behave like a traditional “serious” robot. I wanted it to feel playful and creature-like.
At one point, I felt like the robot was still missing something emotionally, so I added a few simple interactive motions to the idle mode, including a controllable waving gesture and body-tilting movements.
Those small motions surprisingly made a huge difference — the robot immediately started to feel more alive, expressive, and fun to interact with.
To improve stability, I added an MPU6050 IMU for basic posture correction and tilt detection. If the robot tilts too far, it automatically enters an emergency mode that disables all servos and flashes a red light.
The entire robot can be assembled without soldering, making it much more beginner-friendly for people interested in DIY robotics and STEM learning projects.
Another important part of the design was keeping the code structure relatively easy to understand compared to many robotics projects. Because each leg only has 2 DoF, the gait controls stay lightweight and approachable for learning purposes.
I especially enjoyed watching the robot switch between crawling and driving modes for the first time — that was the moment the whole project finally felt alive.
Source code:
https://github.com/Teraen/CyberCrawlerMPY