Search models, users, collections, and posts
4DoF mini robot arm
IP Report






Print Profile(0)
Add the first print profile to earn points
Boost
0
6
0
0
1
0
Released
Description
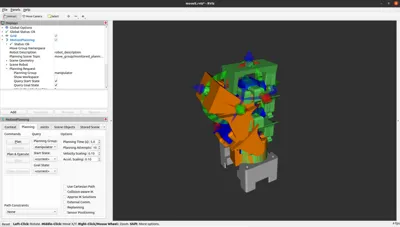
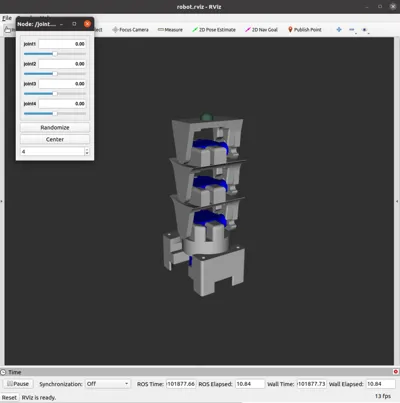
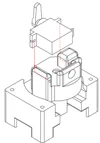
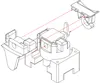
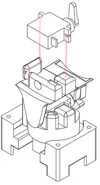
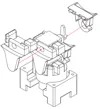
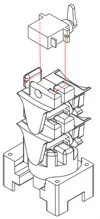
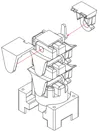
The robot was designed to use sg90 servo motors, and to be controlled via rosserial.
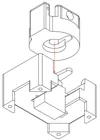
Since the scope of the project only considered its movement, it doesn't have an end effector. However, if you like, you can print any, as the last link (link 4), is completely flat.
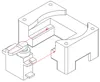
To mount the complete robot, you need 3 screws per servomotor. That shouldn't be a problem, since these motors come with said screws.
For the construction, you need two pairs of the link 2 pieces (link 2 a & link 2 b). It is also possible to keep adding link 2s to get more degrees of freedom and length, but due to the form of the arm and the strength of sg90 servos, I don't think surpassing the original 4 DoF would be a good idea.
Documentation (8)
Assembly Guide (8)
License
This user content is licensed under a
Creative Commons Attribution-Noncommercial-Share Alike
Comment & Rating (0)